TECNOLOGIA
TECNOLOGÍA
Poleas
¿Qué
es una polea?
 Se conoce como polea a
una máquina simple diseñada para transmitir fuerza y operar como un mecanismo
de tracción, reduciendo la cantidad de fuerza necesaria para mover o suspender
en el aire un peso. Consiste en una rueda que gira sobre un eje central, y provista
de un canal en su periferia por donde pasa una cuerda.
Se conoce como polea a
una máquina simple diseñada para transmitir fuerza y operar como un mecanismo
de tracción, reduciendo la cantidad de fuerza necesaria para mover o suspender
en el aire un peso. Consiste en una rueda que gira sobre un eje central, y provista
de un canal en su periferia por donde pasa una cuerda.
La polea puede
definirse además como el punto de apoyo de una cuerda que se mueve en torno a
él sin darle una vuelta completa; tal es la definición del científico francés
Hatón de la Goupillière. Así, en uno de los extremos de dicha cuerda actúa una
resistencia o peso, mientras en la otra una potencia o fuerza.
El uso de poleas es muy
frecuente en los ámbitos de la construcción, la carga o descarga de vehículos y
muchos otros, en los que se requiere de un aparejo para que funcione.
Historia
de la polea
No se sabe demasiado
respecto a la invención de la polea. La única nota al respecto que hay en la
literatura histórica acusa como su inventor a Arquímedes, aunque bien podría
haber sido apenas un estudioso y entusiasta de su uso.
Luego de diseñar el
sistema de poleas adecuado, Arquímedes se sentó a cierta distancia y tiró casi
sin esfuerzo de una cuerda, haciendo que el barco se elevara y se moviera tan
establemente, que parecía aún permanecer en el agua.
Tipos
de polea
 Según el número de
poleas, pueden ser simples o combinadas.
Según el número de
poleas, pueden ser simples o combinadas.
Existen dos formas de
clasificación de las poleas:
Según su
desplazamiento. Puede hablarse de poleas fijas cuando se hallan suspendidas de
un punto fijo; o móviles cuando se trata de un conjunto de dos poleas: una fija
y otra móvil.
Según su número.
Dependiendo de si se trata de una sola polea actuando sola o de un conjunto
interconectado de ellas, podremos hablar de poleas simples o de poleas
combinadas o compuestas, respectivamente.
Partes
de una polea
Toda polea se compone
de cuatro partes fundamentales:
Eje. La porción fija en
torno a la cual se inserta o se suspende la polea y que permite su giro libre.
Se trata de la parte inmóvil y central.
Llanta. Zona externa de
la polea, en donde se halla la garganta por donde pasa la cuerda.
Cuerpo. Se llama así la
parte media de la polea, entre el cubo y la llanta, diseñada para girar ante la
acción de la fuerza, provista de brazos o nervios para facilitar su movimiento.
Cubo. Es la parte interna
de la polea, se trata del agujero cilíndrico al que se acopla el eje.
Engranajes
Los mecanismos de
engranaje son esenciales para el funcionamiento de las máquinas y los motores.
Estos hacen que el par de salida aumente y pueden ajustar la velocidad o el
sentido del giro. Son utilizados casi siempre para la transición de movimientos
giratorios. Pero si se emplean los engranajes adecuados y piezas planas
dentadas, también pueden cambiar el movimiento alternativo en uno giratorio o
viceversa.

¿Que
son los engranajes?
Cuando se habla de
engranaje, se hace referencia a un mecanismo que está conformado por ruedas
dentadas. Los dientes de cada rueda hacen contacto entre sí con el propósito de
pasar la velocidad rotatoria de una rueda a otra. Con estos componentes se
logra transmitir el movimiento giratorio que hay entre dos ejes (paralelos,
oblicuos o perpendiculares).
Rueda dentada, pieza
fundamental de los engranajes
Las ruedas dentadas
varían de acuerdo a como tengan los dientes. Hay otros mecanismos utilizados
para formar engranajes, ejemplo de esto son: La cremallera, el engranaje en
cadena y el tornillo sin fin.
Partes de la rueda
dentada
Eje: Es donde gira la rueda o el eje
de revolución.
·
Circunferencia de Primitiva: En un
engranaje compuesto por dos ruedas, las circunferencias primitivas son
tangentes entre sí. Por otro lado, el diámetro primitivo es el que corresponde
a la circunferencia primitiva.
Diámetro: Es el diámetro de la rueda y
de acuerdo a este valor la rueda debe tener menos o más dientes. Al dividir el
diámetro primitivo entre la cantidad de dientes de la rueda resulta el Módulo.
Si dos ruedas van a formar un engranaje requieren el mismo módulo.
·
Paso Circular: Trayecto desde un punto
de un diente hasta el mismo punto, pero en el diente adyacente. Las ruedas
engranan si tienen el mismo paso circular.
·
Ángulo de Presión: Ángulo en el que el
engranaje gira desde el momento en que el par de dientes se pone en contacto.
Tipos de engranaje
Para diferenciar los
engranajes, estos se pueden dividir en cuatro tipos. Cada clasificación
corresponde al material, la forma del engranaje, posición y forma de los
dientes.
Engranajes de acuerdo
al material utilizado: Son los metálicos y los plásticos.
Engranaje de acuerdo a
la forma: Con respecto a la forma del engranaje, se clasifican en cilíndricos,
cónicos y tornillos sin fin. Por su parte, los engranajes cilíndricos pueden
presentarse de diferentes formas.

De dientes rectos: Son los más baratos
y empleados en el mercado, pero también son más ruidosos y no se usan al
trabajar con velocidades altas.
Helicoidales: Silenciosos y con una
transmisión de fuerza uniforme y más segura.
Cónicos: Transmiten el movimiento
entre los árboles de levas que se cruzan creado un ángulo especifico. Son
troncos de cono que poseen dientes hacia los lados, estos pueden ser curvos o
rectos.
Tornillo sin fin: Son un particular
caso de los helicoidales, donde el piñón es una especie de tornillo con rosca
helicoidal que presenta una o varias entradas. En la parte extrema este
tornillo se puede engranar una rueda dentada, creándose el mecanismo
sinfín-corona. La corona es una rueda que tiene dentado especial, su forma
cóncava logra acoplarse mejor al tornillo.
ROBOTICA
¿Qué es la Robotica?
 Es la rama de la tecnología que se dedica al diseño, construcción, operación, disposición
estructural, manufactura y aplicación de los robots.
Es una ciencia que estudia el diseño y construcción de máquinas capaces de desempeñar tareas
realizadas por el ser humano o que requieren del uso de inteligencia.
Es la rama de la tecnología que se dedica al diseño, construcción, operación, disposición
estructural, manufactura y aplicación de los robots.
Es una ciencia que estudia el diseño y construcción de máquinas capaces de desempeñar tareas
realizadas por el ser humano o que requieren del uso de inteligencia.
ROBOTICA
¿Qué es la Robotica?
Es la rama de la tecnología que se dedica al diseño, construcción, operación, disposición
estructural, manufactura y aplicación de los robots.
Es una ciencia que estudia el diseño y construcción de máquinas capaces de desempeñar tareas
realizadas por el ser humano o que requieren del uso de inteligencia. Historia de la Robotica
 En casi todas las épocas y culturas, los hombres han intentado construir máquinas
automáticas que faciliten su trabajo, hagan más cómoda su existencia, satisfagan su
curiosidad y su afán de aprender e investigar, o simplemente les sirvan de entretenimiento.
Ya en la antigua Grecia se construyeron ingenios de funcionamiento automático a los que
llamaron autómatas; posteriormente en la Edad Media y en el Renacimiento se siguieron
fabricando diversos autómatas, entre ellos el gallo de Estrasburgo (1230) y el león animado
de Leonardo Da Vinci. Durante los siglos XVII y XVIII se crearon ingenios mecánicos de
mayor complejidad que tenían alguna de las características de los robots actuales; así por
ejemplo Jacques de Vaucanson (1709-1782)
construyó varios autómatas, uno de los mas
conocidos es un pato mecánico, que bebe, come,
grazna, chapotea en el agua y digiere su comida
“como un pato verdadero”; estos primeros
autómatas estaban destinados fundamentalmente a
ser exhibidos en las ferias y servir de
entretenimiento en las Cortes y entre la nobleza.
Por esta época de finales del siglo XVIII y
también a principios del XIX se desarrollaron
algunas máquinas para empleo en la industria
textil, entre las que ya había algún telar en el que
mediante el uso de tarjetas perforadas se podía
elegir el tipo de tela a tejer, este hito, constituyó
uno de los primeros precedentes históricos de las
máquinas programadas por control numérico.
En casi todas las épocas y culturas, los hombres han intentado construir máquinas
automáticas que faciliten su trabajo, hagan más cómoda su existencia, satisfagan su
curiosidad y su afán de aprender e investigar, o simplemente les sirvan de entretenimiento.
Ya en la antigua Grecia se construyeron ingenios de funcionamiento automático a los que
llamaron autómatas; posteriormente en la Edad Media y en el Renacimiento se siguieron
fabricando diversos autómatas, entre ellos el gallo de Estrasburgo (1230) y el león animado
de Leonardo Da Vinci. Durante los siglos XVII y XVIII se crearon ingenios mecánicos de
mayor complejidad que tenían alguna de las características de los robots actuales; así por
ejemplo Jacques de Vaucanson (1709-1782)
construyó varios autómatas, uno de los mas
conocidos es un pato mecánico, que bebe, come,
grazna, chapotea en el agua y digiere su comida
“como un pato verdadero”; estos primeros
autómatas estaban destinados fundamentalmente a
ser exhibidos en las ferias y servir de
entretenimiento en las Cortes y entre la nobleza.
Por esta época de finales del siglo XVIII y
también a principios del XIX se desarrollaron
algunas máquinas para empleo en la industria
textil, entre las que ya había algún telar en el que
mediante el uso de tarjetas perforadas se podía
elegir el tipo de tela a tejer, este hito, constituyó
uno de los primeros precedentes históricos de las
máquinas programadas por control numérico.Tipos de Robots
Según su cronología los robots pueden clasificarse en:
1ª Generación:
Manipuladores: Son sistemas mecánicos multifuncionales con un sistema sencillo de control, manual, de secuencia fija o de secuencia variable.
2da Generación:
Robots de Aprendizaje: Repiten una secuencia de movimientos que ha sido ejecutada previamente por un operador humano, por medio de un dispositivo mecánico. El operador realiza movimientos requeridos mientras el robot sigue y memoriza. (Androides)
3ra Generación:
Robots de Control Sensorizado: En este tipo de robots el controlador ejecuta las órdenes de un programa por medio de una computadora y las envía a un manipulador para que realice los movimientos necesarios.
4ta Generación:
Robots inteligentes: Poseen se sensores que envían información a la computadora de control sobre el estado del proceso, permitiendo una toma inteligente de decisiones y control del proceso en tiempo real.
POLIPASTO
 Máquina que se utiliza para levantar o mover una carga con
una gran ventaja mecánica, porque se necesita aplicar una fuerza mucho menor al
peso que hay que mover. Lleva dos o más poleas incorporadas para minimizar el
esfuerzo.
Máquina que se utiliza para levantar o mover una carga con
una gran ventaja mecánica, porque se necesita aplicar una fuerza mucho menor al
peso que hay que mover. Lleva dos o más poleas incorporadas para minimizar el
esfuerzo.
Máquina que se utiliza para levantar o mover una carga con
una gran ventaja mecánica, porque se necesita aplicar una fuerza mucho menor al
peso que hay que mover. Lleva dos o más poleas incorporadas para minimizar el
esfuerzo.
Estos mecanismos se utilizan mucho en los talleres o
industrias que cargan elementos y materiales muy pesados para hacer más rápida
y fácil la elevación y colocación de estas piezas en las diferentes
máquinas-herramientas que hay en los talleres o almacenes, así como cargarlas y
descargarlas de los camiones que las transportan.
Historia
Es el genio nacido en Siracusa en el siglo III ANE.,
Arquímedes, quien diseña el primer sistema de poleas a instancias de un pedido
de su rey y mecenas, Hierón II, tirano de Siracusa, quien preocupado por hacer
frente y poder derrotar al ejército romano, encargó al sabio siracusano una
máquina capaz de hacer frente al enemigo.
Y así fue que nació el primer sistema de poleas o polipasto:
una especie de grúa que, con una inmensa boca a modo de tenaza en su extremo,
era capaz de enganchar y levantar a los barcos enemigos.
Tipos de Polipasto
Se pueden clasificar según estos parámetros:
Cuando una de las poleas solo tiene una garganta se denomina
aparejo sencillo.
El resto se llaman aparejos dobles.
Según el numero de vueltas queda la garganta:
- De cuatro vueltas.
- De seis vueltas.
Según la forma en la que multiplican la fuerza:
- Factorial: a mayor cantidad de poleas móviles, mayor será la
fuerza que se aplica.
- Potencial: multiplican la fuerza por 2 elevado al número de
poleas.
- Diferencial: la fuerza depende de la diferencia entre la
longitud del radio de ambas poleas.
- De cuerda.
- De cable.
- De cadena.
- Manuales.
- De palanca.
- Eléctricos.
Manivela

Una manivela es una barra que puede girar y que está unida a
un eje. Cuando se gira la manivela, el eje gira también. La manivela es, por
tanto, un operador que sirve para hacer girar un eje con menos esfuerzo. Se
puede encontrar manivelas en máquinas como los coches antiguos, las pequeñas
hormigoneras de obra, los tornos manuales, algunos juguetes, entre otros.
Un cigüeñal es un conjunto de manivelas que están colocadas
sobre un mismo eje. Se utiliza cuando queremos dar movimiento a varios
elementos de forma alternativa. También se puede conseguir el efecto contrario.
El caso más conocido es el del cigüeñal del motor de explosión -el que llevan
la mayoría de los coches- que funciona convirtiendo el movimiento alternativo
de los pistones en el movimiento rotatorio del eje principal.
Una biela es una barra rígida que está conectada a un cuerpo
que gira y es arrastrada por él. A medida que el cuerpo gira, la biela avanza y
retrocede en cada una de las vueltas. Se emplea para convertir un movimiento de
giro en un movimiento de avance y retroceso. El efecto es reversible. Es decir,
moviendo una biela hacia adelante y hacia atrás se puede conseguir que un
cuerpo gire. La biela también puede servir para transmitir el movimiento
giratorio de una rueda a otra, como ocurría en muchos trenes de principios de
siglo.
El sistema biela-manivela
 La biela y la manivela suelen utilizarse juntas, formando un
sistema de biela-manivela. Uno de los ejemplos más conocidos es el de las
ruedas de los trenes de vapor.
La biela y la manivela suelen utilizarse juntas, formando un
sistema de biela-manivela. Uno de los ejemplos más conocidos es el de las
ruedas de los trenes de vapor.
Otro caso de biela-manivela muy familiar para todos es el
del pedal de la bicicleta. En este caso, el pedal es la manivela, mientras que
nuestra propia pierna hace de biela.
La palanca
Es una máquina simple compuesta por una barra
rígida situada sobre un punto de apoyo denominado fulcro. En el funcionamiento de
la palanca intervienen tres fuerzas:
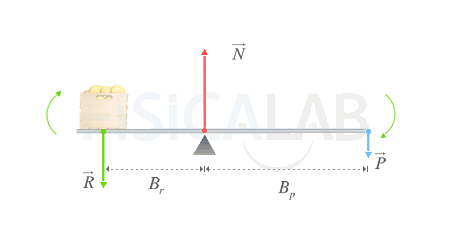
Potencia, P:
Se trata de una fuerza que aplicamos
voluntariamente en una parte de la barra con el fin de vencer a otra fuerza
denominada Resistencia. Su distancia con respecto al punto de apoyo sobre el
fulcro se denomina brazo de potencia, Bp.
Resistencia, R:
Se trata de una fuerza ejercida sobre la
palanca por un cuerpo que generalmente tratamos de mover o deformar mediante la
Potencia. Su distancia con respecto al punto de apoyo sobre el fulcro se
denomina brazo de resistencia, Br.
Reacción Normal, N:
Es la fuerza ejercida por el fulcro
sobre la barra. Si consideramos que la barra no tiene masa, N se obtiene como
la suma de las fuerzas P y R.
Ejemplos de palanca
Algunos ejemplos cotidianos de palanca pueden ser:
De primer grado: el balancín, las tijeras, las tenazas, los
alicates, las catapultas con que se asediaban castillos en la Edad Media.
De segundo grado: la carretilla, el cascanueces, una
embarcación a remos, una camilla de enfermería, una máquina de hacer ejercicios
por levantamiento.
De tercer grado: una caña de pescar, un quitagrapas, una
pinza de cejas o la articulación témporo-mandibular del cuerpo humano.
Plano inclinado
 Es una máquina simple que consiste en una superficie plana
que forma un ángulo agudo con el suelo y se utiliza para elevar cuerpos a
cierta altura.
Es una máquina simple que consiste en una superficie plana
que forma un ángulo agudo con el suelo y se utiliza para elevar cuerpos a
cierta altura.
Historia
Aunque el plano inclinado es un operador presente en la
naturaleza (en forma de rampa o cuesta) y que ya había sido fabricado en forma
de cuña (puntas de flecha y lanza, hachas...) por parte de las culturas prehistóricas,
se supone que no empezaron a construirse rampas conscientemente hasta el
nacimiento de las culturas megalíticas (4000 a.C.) y la consiguiente necesidad
de desplazar y emplear grandes bloques de piedra.
Con la aparición de los carros empezaron a construirse
caminos que tenían que salvar grandes accidentes geográficos (sobre el 3000
a.C.)
Hacia el 2800 a.C., en Mesopotamia, empieza a emplearse en
forma de escalera de obra (adaptación de la rampa a la fisonomía del ser
humano) en las viviendas y construcciones sociales.
Después los romanos generalizaron su uso para el trazado de
calzadas y la conducción de agua a las ciudades (acueductos).
Comentarios
Publicar un comentario